舵机是什么?
舵机,是指在自动驾驶仪中操纵飞机舵面(操纵面)转动的一种执行部件。
舵机分有:
①电动舵机,由电动机、传动部件和离合器组成。接受自动驾驶仪的指令信号而工作,当人工驾驶飞机时,由于离合器保持脱开而传动部件不发生作用。
②液压舵机,由液压作动器和旁通活门组成。当人工驾驶飞机时,旁通活门打开,由于作动器活塞两边的液压互相连通而不妨害人工操纵。此外,还有电动液压舵机,简称“电液舵机”。舵机的大小由外舾装按照船级社的规范决定,选型时主要考虑扭矩大小。如何审慎地选择经济且合乎需求的舵机,也是一门不可轻忽的学问。
舵机,又称伺服电机,其工作过程是把所接收到的电信号转换成电动机轴上的角位移或角速度输出。目前广泛应用于机器人控制领域中。SG90舵机,采用高强度ABS透明外壳配以内部高精度尼龙齿轮组,加上精准的控制电路、高档轻量化空心杯电机使该微型舵机的重量只有9克,而输出力矩达到了惊人的1.8kg*cm。标准的舵机有三条控制线,分别是电源、地和信号线。舵机的针脚定义为:棕色线——GND,红色线——5V,橙色线——信号线。
舵机的控制一般需要不断地发给它一个高电平时间在1-2ms之间、低电平时间在5-20ms之间的脉冲信号。注意:Arduino板上支持舵机的只有数字口9和10,因此舵机橙色线只能连接数字口9或10,另外我们使用的SG90舵机转动角度在0-180°之间。
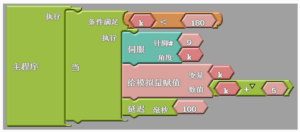
控制舵机的转动角度代码: